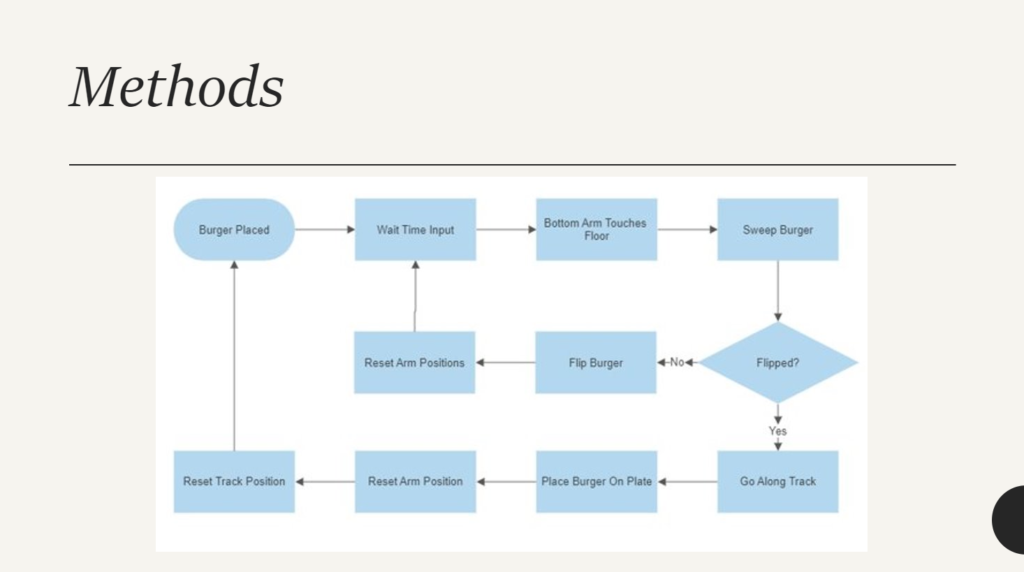
For my Spring 2022 Capstone project, I decided to create a burger flipping robot. The robot’s main objective is to take a burger at a fixed position, flip the burger, wait some time, and then transport the burger to another surface. The goal of this project is to explore how we can use robots in the kitchen to complete the simple steps like flipping over food.
The robot’s structure is almost completely ordered from Servo City, while the 3D parts were modeled in TinkerCAD. I used a 35 kg servo motor as the main support motor to hold the arm up and a 25 kg servo motor to control the end effector’s movement. I used another 25 kg servo motor to rotate the spatula. I am using a NEMA 17 stepper motor to control the movement along the track and a microstep driver to control the stepper motor. Controlling the whole robot is a Raspberry Pi 3 B+ using python code.
Elevator Pitch: https://youtu.be/Rt6IVJYVH7A